

Categorization:Harness Component

I. Characteristics and Advantages of Ultra-Fine Coaxial Beam
Extremely fine coaxial cables are composed of an inner conductor, insulation layer, shielding layer, and outer sheath, and possess excellent electromagnetic interference resistance and precise impedance control. Their small diameter and high flexibility make them particularly suitable for applications in robot interior spaces with limited space, while also supporting high-speed signal transmission without significant attenuation or distortion. Compared to traditional wiring or ordinary cables, extremely fine coaxial cables can maintain signal integrity in high-frequency, high-precision scenarios, providing a reliable guarantee for the performance of robot AI modules.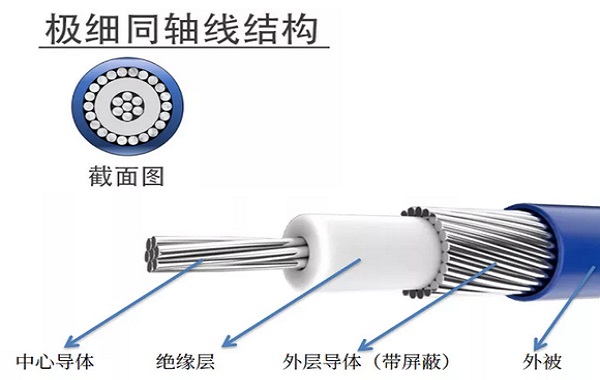
Application scenarios in robot AI modules
In visual systems, data transmission between cameras and main control chips usually employs high-speed interfaces such as MIPI-CSI/DSI, which have extremely high requirements for signal integrity. Sensor modules like IMU, LiDAR, or rangefinders also require stable high-speed data collection and transmission. The radio frequency signal wiring of wireless communication modules depends on cables with low loss and high shielding to ensure data reliability. Additionally, high-speed data links between different boards or modules also need good impedance matching and anti-interference capability to ensure stable operation of robots in complex environments.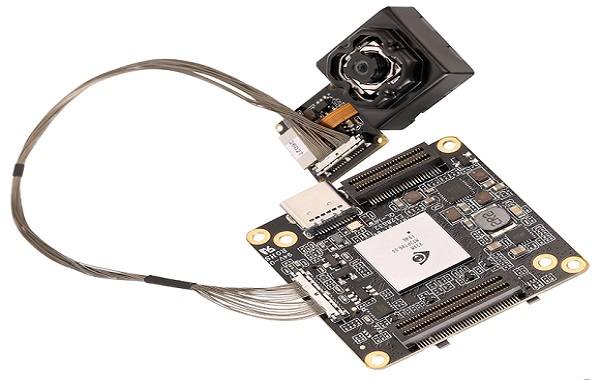
Three, key points for wiring design and optimization
Reasonable wiring design is the key to ensuring signal stability. Firstly, it is necessary to shorten the transmission path as much as possible and avoid unnecessary bends, while ensuring that the bending radius is greater than the allowable value of the cable. The shielding layer must be continuously connected to the ground to prevent noise and crosstalk. The impedance matching between the cable and the connector needs to be strictly controlled to avoid signal reflection. Terminal processing requires precise stripping and crimping to reduce losses caused by poor craftsmanship. For robot motion joints or vibration environments, flexible sheaths can be added, line cards can be used for fixation, and signal testing should be carried out after wiring to ensure that the waveform, frequency, and anti-interference performance meet expectations. Through these measures, signal distortion, interference, or unstable joints can be effectively reduced, enhancing the reliability and lifespan of the robot system.
“Without the consent or authorization of this site, no one shall reproduce, reprint, distribute, cite, change, broadcast or publish the content in whole or in part in any form, nor shall there be any other violation of the copyright of this site.








